Attempting to Train Basil Faulty the DonkeyCar
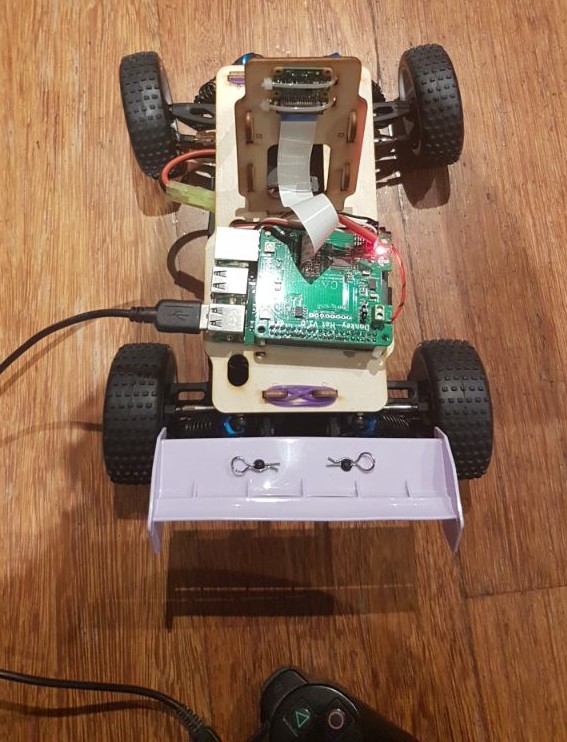
I tried to set up the training environment using Ubuntu in VirtualBox on Windows to train Basil Faulty the DonkeyCar.
Setting up the Training Environment
Installing Ubuntu on VirtualBox
The first step in training was to set up Linux on my laptop. The training for a DonkeyCar could be done on the pi itself but it would be quite limited by the Pi’s resources, it is very much recommended to train on a more powerful computer. Another hurdle was that I run Windows on my laptop and although apparently it is possible to train on Windows, I thought this was a good opportunity to brush up on my linux skills. The fastest way to get up and running was to install VirtualBox and run Ubuntu 18.4 in a virtual machine.
The instructions for doing this are all over the internet, but two parts I need to add - I needed to use a fixed-size hard drive rather than variable (which causes problems with rsync) and to ensure that the network adapter was in bridging mode otherwise I would not be able to connect to the network (and connect to Basil).

Set up DonkeyCar on Ubuntu
I again followed the instructions on the OHMC Instructions and DonkeyCar Docs to set up DonkeyCar on Ubuntu but with a minor change - we used TensorFlow V1.13.1 instead of the version in the other docs.
To change the resolution in Ubuntu: xrandr -s 1440x900
SSH into the pi: ssh pi@basilfaulty.local
I decided at this point I should change the default password for added security like this: sudo passwd pi
Normally you should be able to type passwd to trigger the change but this wasn’t working for me, specifying the user and sudo privileges worked.
I went into the right folder and made sure to back up all my training data:
cd play/ohmc_car
mv tub tub_ps3_not_working
Copying the files
rsync was the recommended method of copying the files between the Pi and the PC but for some reason this wasn’t working for me. I think this was due to my VM setup initially being a dynamic-hard-drive rather than fixed-size but I’ve included the other options I tried here, in case I need them later, but in the end I went back and did a fresh install.
I first found the size of the tub (this is the place where all the training data is kept): du -h tub - it was 5.5Mb - so what’s the problem?
I deleted the old tub rm -r tub
I zipped up the whole ohmc_car folder: zip -r ohmc_car.zip ohmc_car
I tried enabling copy/paste between the virtualbox:
Go to Settings -> General -> Advanced -> Copy/paste bidirectional.
This seems to enable the option for text but not for files.
Copying to a USB stick
Next I tried just copying onto a USB stick to transfer the file. I followed these instructions, here are the results:
ls -l /dev/disk/by-uuid
--- noticed my id was sda1
sudo mkdir /media/twulzblue
sudo chown -R pi:pi /media/twulzblue
sudo mount /dev/sda1 /media/twulzblue -o uid=pi,gid=pi
cd /media/twulzblue
ls
This showed me all the files on the usb so it was mounted successfully! I copied the zip with cp ~/play/ohmc_car.zip . and unmounted the drive with sudo umount /media/twulzblue - notice this is umount not unmount!
This way I could get the files off the Pi but still had troubles with enabling the sharing of the USB between the host PC and VM.
Sharing a Folder between Ubuntu in a VM and Windows
To set up sharing between my host PC (Wndows) and the VM (Ubuntu) I had to first install the Guest Additions Devices -> Insert Guest Additions CD Image and go through the install process.
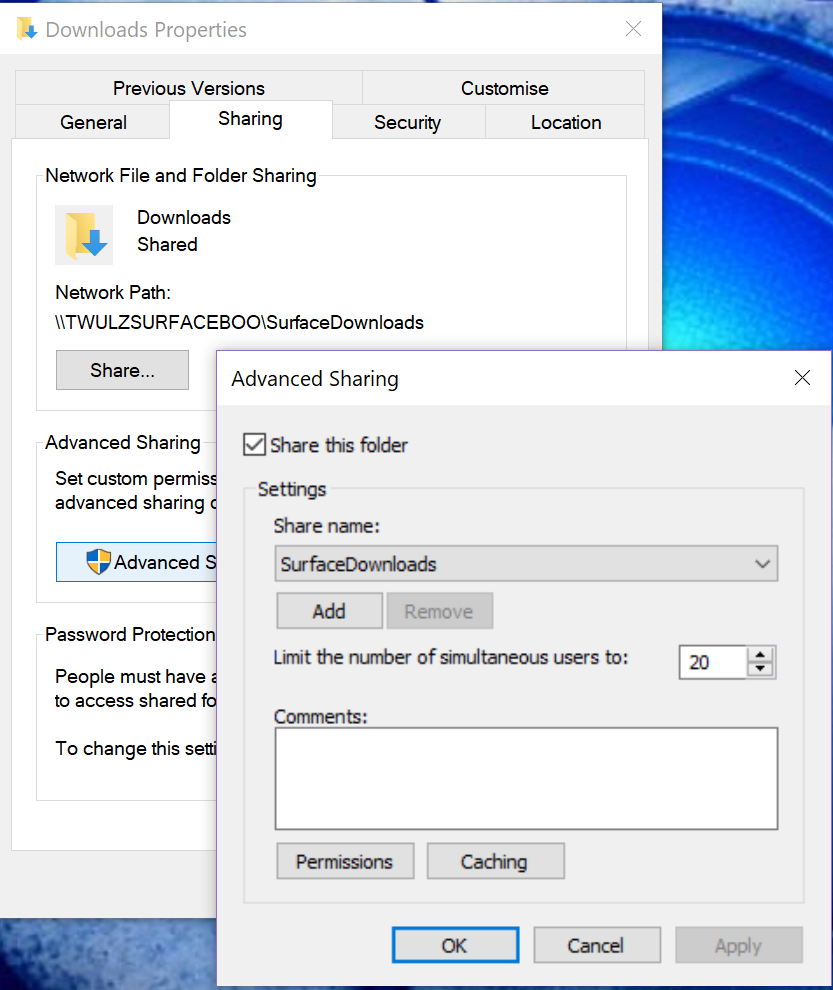
These are the windows sharing settings I needed:
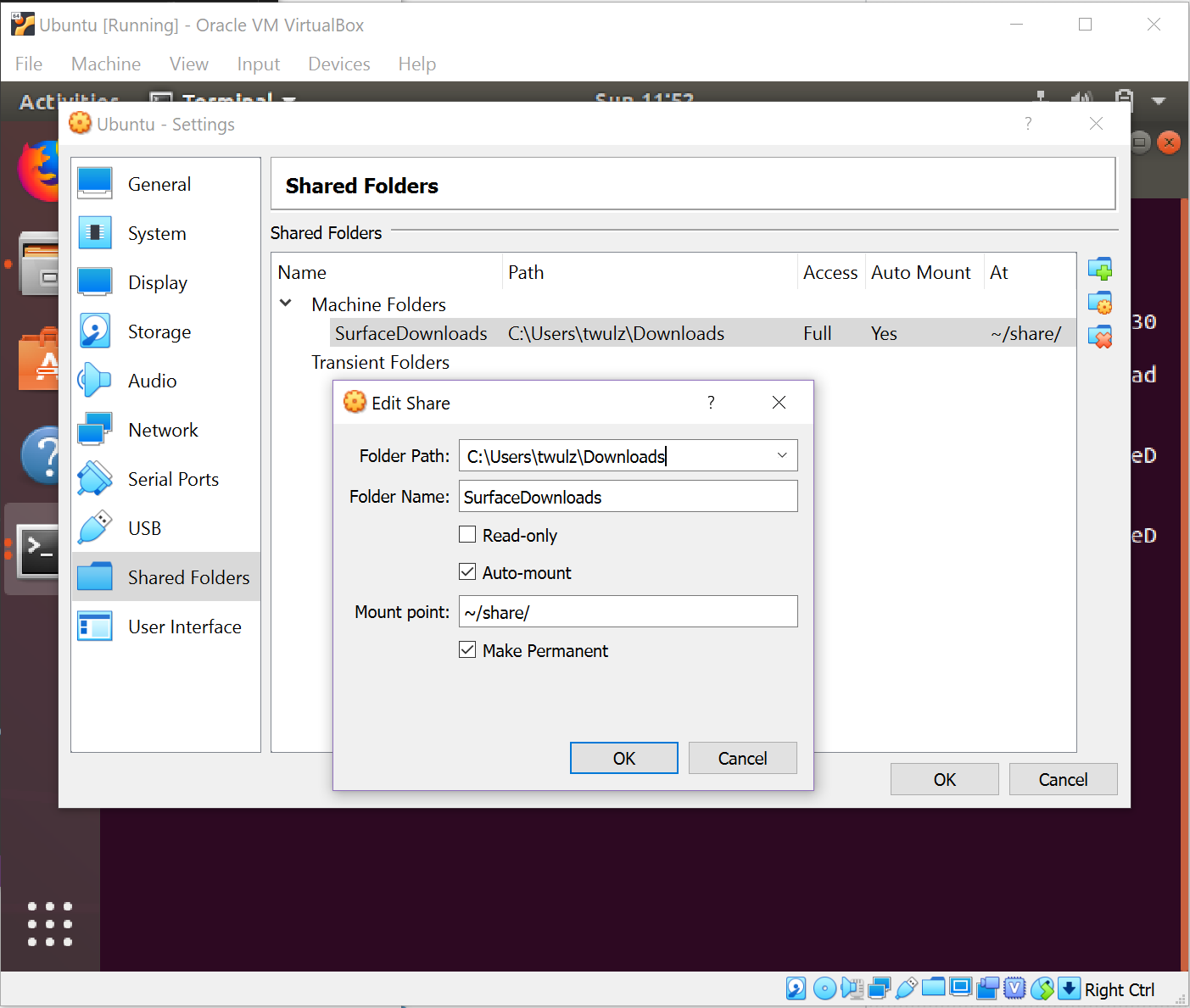
And the Linux settings Devices -> Shared Folders -> Settings
To find out the ID:
id
uid=1000(twulz) gid=1000(twulz) groups=1000(twulz),4(adm),24(cdrom),27(sudo),30(dip),46(plugdev),116(lpadmin),126(sambashare),999(vboxsf)
Then add user for vboxsf group and finally mount the drive.
sudo usermod -G vboxsf -a twulz`
sudo mount -t vboxsf -o rw,uid=1000,gid=1000 SurfaceDownloads ~/share/
I could finally access the data!
cd ~
cp /share/ohmc_car.zip .
unzip ohmc_car.zip
cd ohmc_car
In linux you can view the images using oeg image.jpg.
With all that sorted, training is done with one command:
python manage.py train --tub tub --model /models/model_first.hdf5
Troubleshooting
After running the training command I got the following error:
ModuleNotFoundError: No module named 'donkeypart_ps3_controller'
I don’t need these to train the model so I commented the relevant parts in config.py and manage.py (the same to enable/disable the controller to begin with).
nano manage.py
#from donkeypart_ps3_controller import PS3JoystickController
...
#ctr = PS3JoystickController(
# throttle_scale=cfg.JOYSTICK_MAX_THROTTLE,
# steering_scale=cfg.JOYSTICK_STEERING_SCALE,
# auto_record_on_throttle=cfg.AUTO_RECORD_ON_THROTTLE
#)
#V.add(ctr,
# inputs=['cam/image_array'],
# outputs=['user/angle', 'user/throttle', 'user/mode', 'recording'],
# threaded=True)
After this I got an error that python wasn’t installed correctly so I added it to the path using the instructions from the ohmc link.
I kept hitting problem after problem with the training, I decided to take Basil along to the hackerspace so I could get some help from people who often used linux. The next post will be about any progress I make there.